H-bridge
Project Description
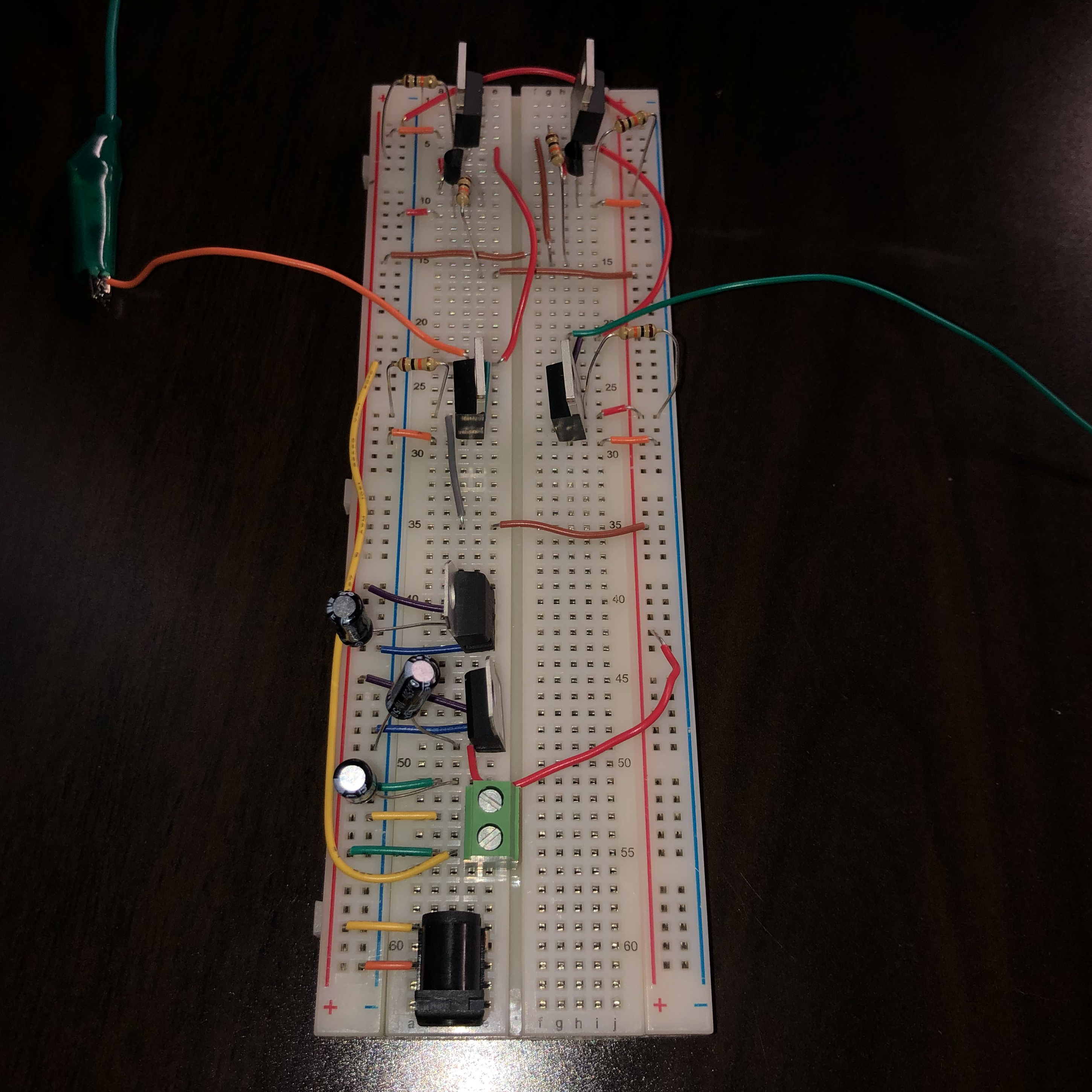
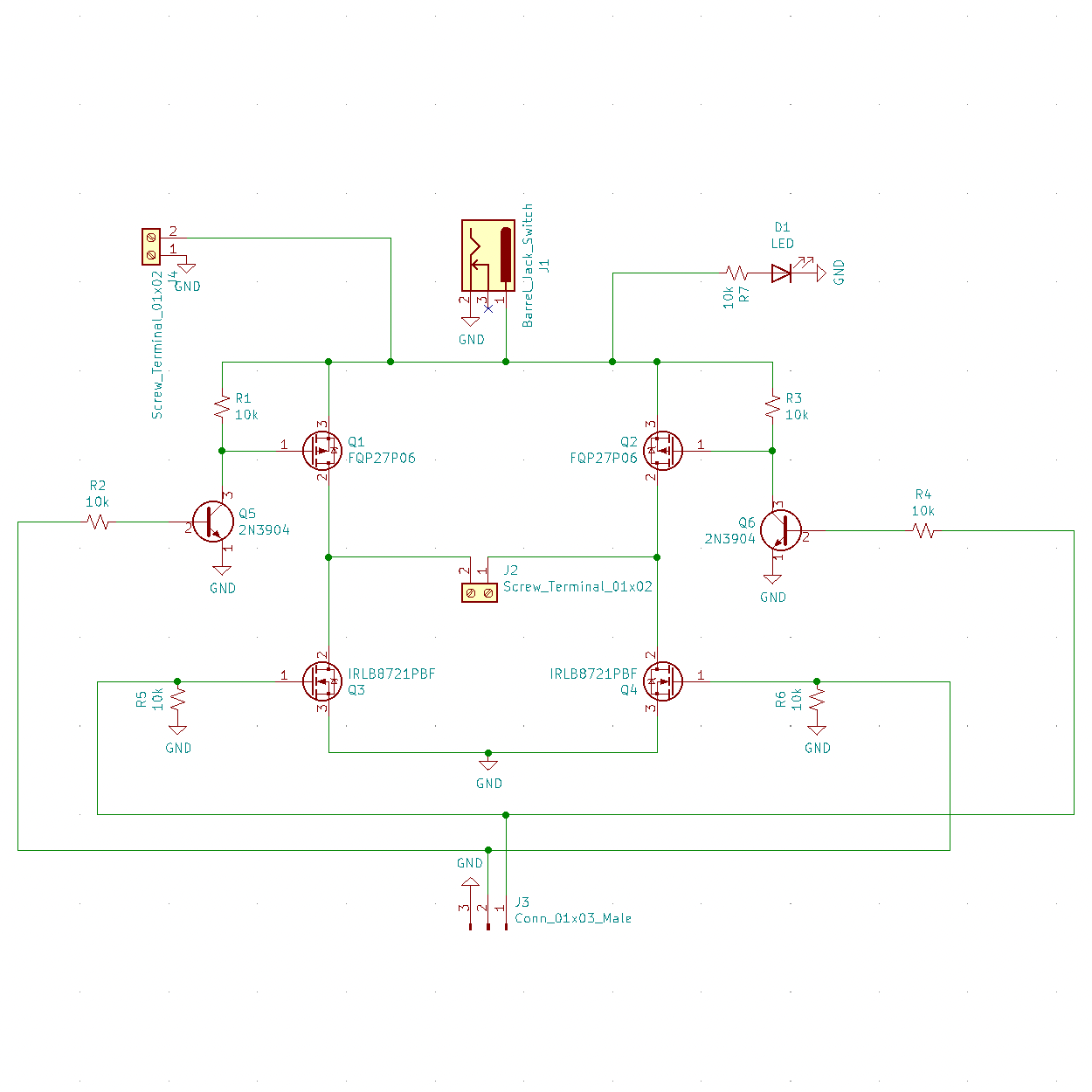
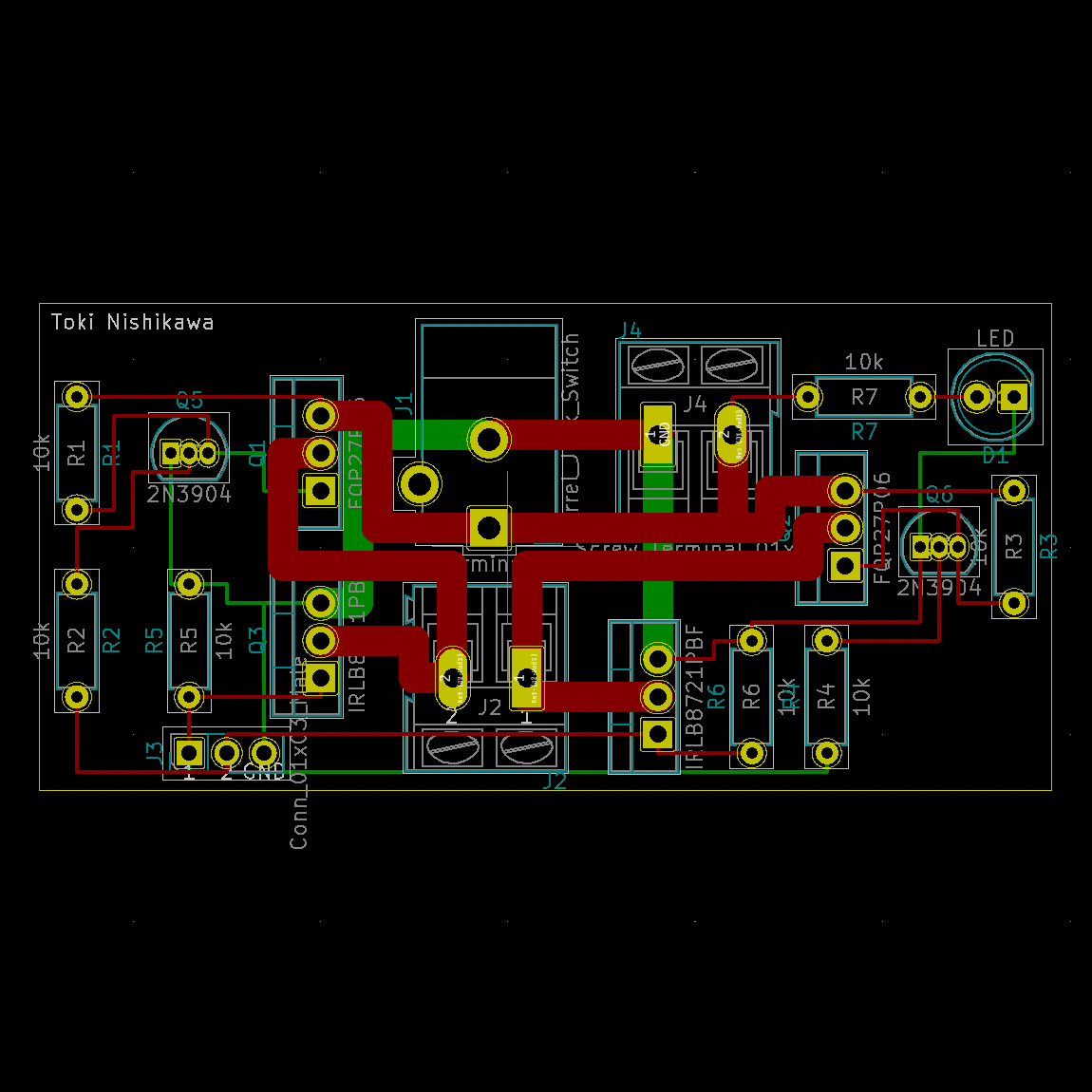
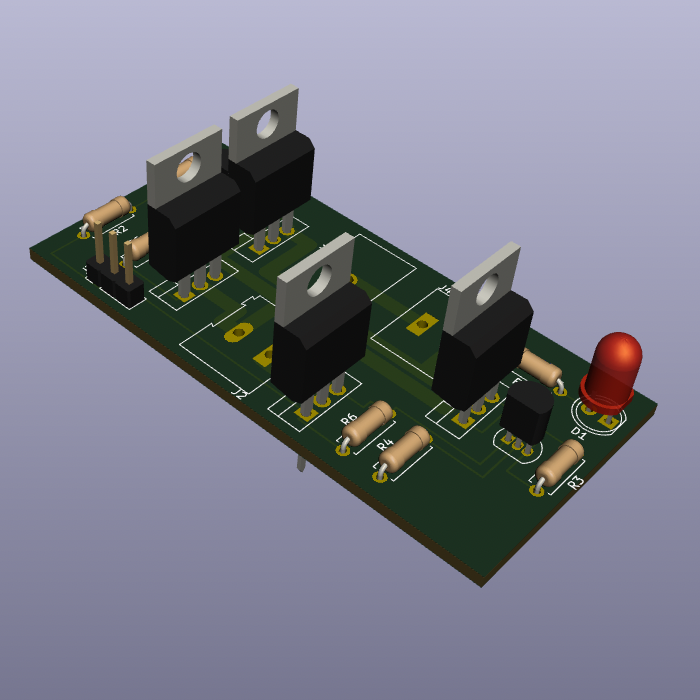
I designed an H-bridge circuit on KiCad. Since this circuit can make a DC motor spin in both directions, it can be used to change the direction of a wheel. When my group and I built our robot later that year, we used two H-bridge circuits for each of the two wheels that we needed to power. Images of the prototype, the schematic, the layout of the PCB, and a 3D view of the PCB can be found below. Note that clicking on the images below will enlarge them – just scroll down.
×
![]()